Contrôle robotique en temps réel
Année
2014
Le client
Ce projet représente une collaboration entre le CIMMI et le Laboratoire de vision et de systèmes numériques (LVSN) de l’Université Laval, visant à fusionner recherche appliquée et innovation technologique.
Le problème
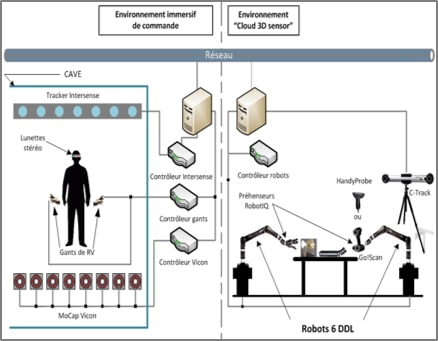
L’objectif était de concevoir un système permettant de contrôler à distance un robot réel via un environnement virtuel, avec une attention particulière portée au développement d’une solution immersive virtuelle à coût réduit.
La solution
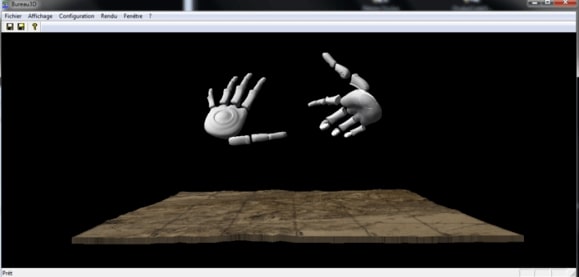
Le CIMMI a développé un système de visualisation et d’interaction dans un environnement virtuel, en intégrant les technologies Leap Motion et Oculus Rift pour une immersion complète. Les utilisateurs pouvaient manipuler un robot virtuel via des points de contrôle, les mouvements étant répliqués par le robot physique en temps réel grâce à un système de contrôle sophistiqué. Ce système a permis une interaction intuitive et immédiate entre l’environnement virtuel et le robot réel.